キヤノンは、カメラを用いて自己位置推定と環境地図作成を同時に行う「Visual SLAM(※1)技術」を含む映像解析ソフトウエアを本日より提供開始します。「移動ロボットの眼」となる本ソフトウエアを協業メーカーに提供することで、ガイドレス方式の次世代自動搬送台車(Automated Guided Vehicle、以下AGV)や自律走行搬送ロボット(Autonomous Mobile Robot、以下AMR)に代表される移動ロボット市場に参入します。
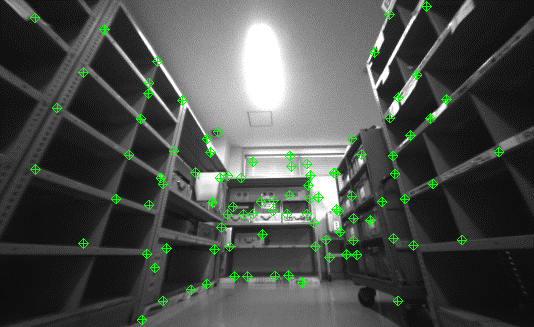
Visual SLAM技術による映像解析イメージ(映像からの特徴点抽出)
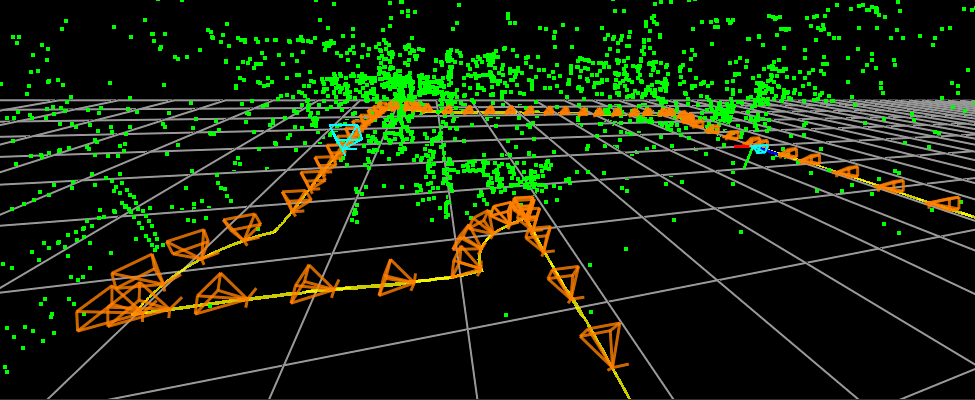
Visual SLAM技術による映像解析イメージ(自己位置推定による移動軌跡)
キヤノンは、創業以来、光学技術を中心とした多様な映像技術の革新を重ね、高性能なカメラやレンズを生み出し続けることによって、写真・映像文化の発展に貢献してきました。近年は、その領域を、ネットワークカメラにより「安心・安全」の分野に広げるとともに、他社との協業を進め、工場の生産現場における「自動化」や「見える化」を推進しています。
Visual SLAM技術は、カメラを用いて、撮影された映像から周囲の環境の3次元情報とカメラの位置姿勢を同時に推定します。水平面・垂直面の幅広い画角で撮影されたカメラの映像データを用いるため、レイアウト変化の多い現場でも高精度に位置姿勢を計測することができます。キヤノンは、現実世界と3D CGをリアルタイムに融合するMR(Mixed Reality:複合現実)の長年にわたる技術開発で培った、周囲の静止物をマーカー代わりにする空間特徴位置合わせ技術を活用することでVisual SLAM技術を含む映像解析ソフトウエアの実用化に成功しました。
このたび、「移動ロボットの眼」となるVisual SLAM技術を含む映像解析ソフトウエアを協業メーカーに提供することで次世代AGV・AMRに代表される移動ロボット市場に参入します。第1弾として、日本電産シンポ株式会社が発売を開始する自動搬送台車「S-CART-V」シリーズに、キヤノンが開発した映像解析システム(※2)を提供しました(※3)。
今後はVisual SLAM技術の展開の幅を広げ、「移動ロボットの眼」をAGV・AMR分野のみならず、清掃、運搬、警備、点検、探査などさまざまな用途で活用されるサービスロボットやドローンに搭載することを目指します。
| ソフトウエア名 | 提供開始日 |
| Vision-based Navigation Software | 2020年8月5日 |
※1 SLAMはSimultaneous Localization and Mappingの略で、自己位置推定と環境地図作成を同時に行う技術。Visual SLAM技術は、カメラを用いたSLAM技術。
※2 映像解析システム「Vision-based Navigation System for AGV」。映像解析ソフトウエア「Vision-based Navigation Software」、ステレオカメラ、コントローラーハードウエアなどで構成。
※3 詳細は同時発表のプレスリリース(URL:https://global.canon/ja/news/2020/20200805.html)をご覧ください。