ヤンマーホールディングス株式会社(本社:大阪市、社長:山岡健人)は、2022年3月9日(水)から12日(土)まで、東京ビッグサイトで開催される「2022国際ロボット展(主催:一般社団法人 日本ロボット工業会、日刊工業新聞社)」において、「ヤンマー大玉トマト収穫ロボット」試作機を出展します。
「2022国際ロボット展」は、「ロボットがつなぐ人に優しい社会」をテーマに、国内外における産業用・サービス用ロボットおよび関連機器を一堂に集めて展示する世界最大級のロボット・トレードショーです。
当社はNEDO(国立研究開発法人新エネルギー・産業技術総合開発機構)ブースに出展し、現在NEDO助成事業で開発中の「ヤンマー大玉トマト収穫ロボット」の試作機を展示します。
展示会概要
名称:2022国際ロボット展[INTERNATIONAL ROBOT EXHIBITION 2022(iREX2022)]
会期:2022年3月9日(水)~ 12日(土) ※オンライン会場は3月1日(火)~18日(金)
会場:東京ビッグサイト
ヤンマー出展場所:E7-41(NEDOブース内)
「2022国際ロボット展」について https://biz.nikkan.co.jp/eve/irex/
「ヤンマー大玉トマト収穫ロボット」について
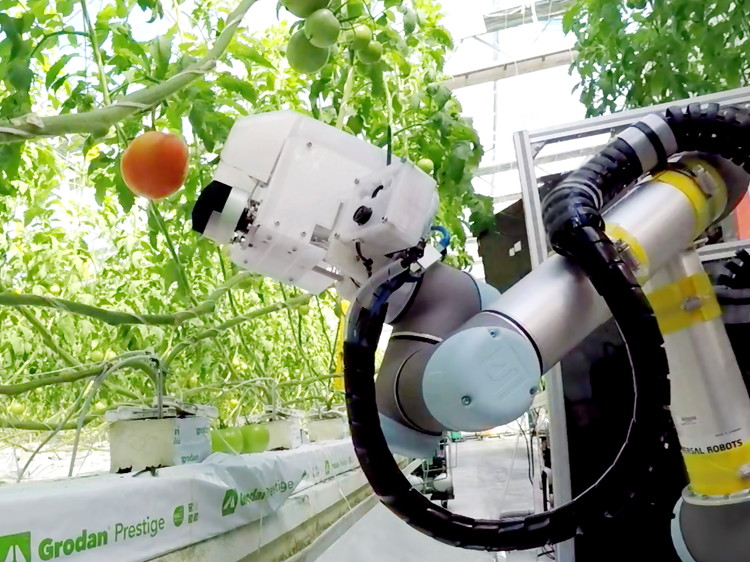
「ヤンマー大玉トマト収穫ロボット」は、当社のソフト開発技術、農業のノウハウを活かして開発した農業分野での自動化を推進する日本初※の大玉トマト収穫ロボットです。個体ごとに形状が異なり、扱いの難しい大玉トマトの収穫にAI(深層学習)を取り入れ、自動化することで、人手不足の課題解決に貢献します。
・収穫するトマトの形状/姿勢認識
吸着切断ハンドで収穫するため、吸着できる位置を画像認識技術で特定し、AI(深層学習)により認識した果実の姿勢(付け根の向き)から切断位置を推定します。
・吸着切断ハンド
球体を把持する従来の吸盤では難しかった凹凸のある大玉トマトの吸着を、当社が新たに独自開発した「Trun-cone pad(トランコーンパッド)」により実現しました。パッドに吸着したトマトの付け根「果梗(かこう)」にハサミを差し込み、根元から切断して収穫します。
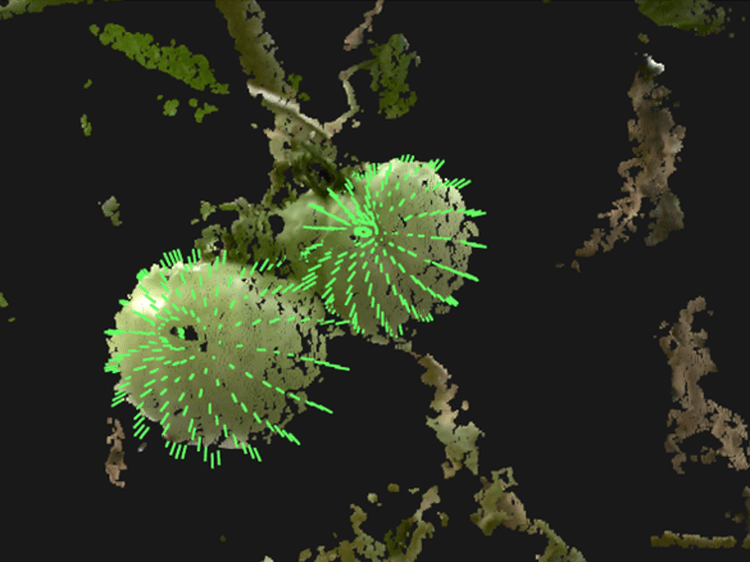
認識カメラによる形状解析

独自開発の吸着切断ハンド
※2022年2月末現在、大玉トマト収穫において。当社調べ。
<ヤンマーについて>
1912年に大阪で創業したヤンマーは、1933年に世界で初めてディーゼルエンジンの小型実用化に成功した産業機械メーカーです。「大地」「海」「都市」のフィールドで、産業用エンジンを軸に、アグリ、建機、マリン、エネルギーシステムなどの事業をグローバルに展開し、お客様の課題を解決するソリューションを提供しています。ヤンマーは“A SUSTAINABLE FUTURE-テクノロジーで、新しい豊かさへ。-”をブランドステートメントに掲げ、次の100年へ向けて持続可能な社会の実現に貢献していきます。
詳しくは、ヤンマーのウェブサイトhttps://www.yanmar.com/jp/about/をご覧ください。
<注記>
記載されている内容は発表時点のものです。最新の情報とは内容が異なっている場合がありますのでご了承願います。