メカナムホイール搭載の台車ロボットで、可搬重量40kg、最高速度1.3m/sを実現
ロボット関連製品の開発・製造・販売を行うヴイストン株式会社(本社:大阪府大阪市、代表取締役:大和信夫)は、研究開発用台車ロボット「メカナムローバーVer2.0」を2018年10月31日より販売いたします。
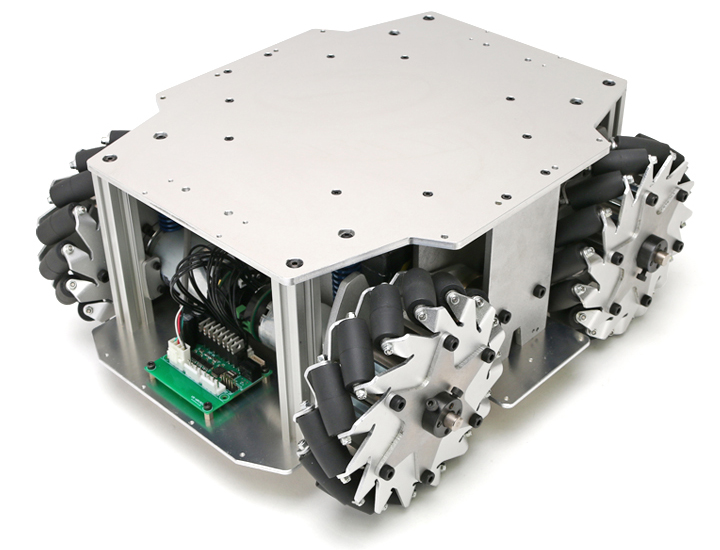
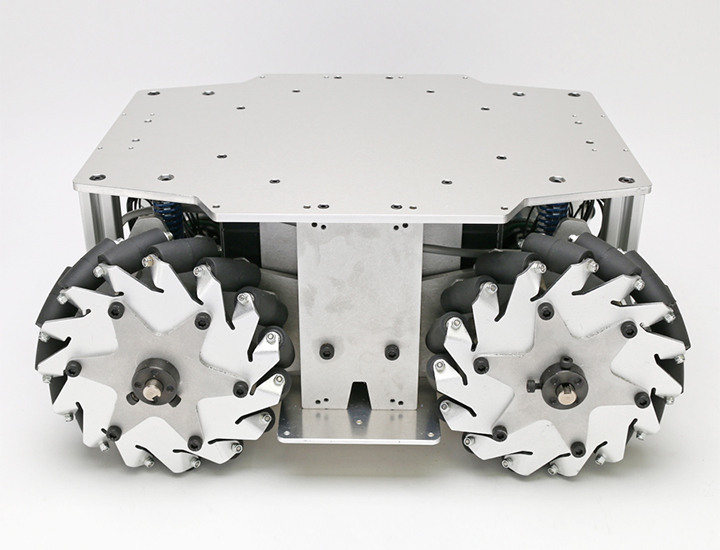
メカナムローバーVer2.0
「メカナムローバーVer2.0」は、好評発売中の「メカナムローバーVer1.2」の後継機種となる4輪駆動の研究開発用台車ロボットです。アルミフレームの高剛性なロボットとなっており、可搬重量は40kg、最高速度は1.3m/sを実現しています。Wi-Fi / BLE / Bluetooth Classicの無線通信規格と、USBシリアル通信に対応しており、PCやタブレット、Raspberry Piなどから制御できます。また、ROSを使った制御に対応しております。制御ボードには、Arduino互換ボード「VS-WRC021」を搭載しており、Arduino IDEを用いてプログラムすることで動作させることも可能です。
【商品特長】
・全方向移動台車ロボット
4輪のメカナムホイールを駆動輪として使用しているため、前後方向の移動や旋回動作だけでなく、左右方向や斜め方向への平行移動が可能です。さらに、各ホイールにサスペンションを装備したことで、1cm程度の段差であれば各輪が確実に接地し、安定した走行を実現します。
・無線/有線接続で制御
Wi-Fi / BLE / Bluetooth Classic の 3種の無線通信と、有線の USBシリアル通信に対応しています。指定のコマンドを用いることで、PC やタブレットなど、様々なデバイスから本体を制御することが可能です。また、Raspberry Pi の GPIO ソケットと互換のコネクタが搭載されているため、ロボット本体にRaspberry Piを簡単に搭載することができ、 制御にも使用することができます。
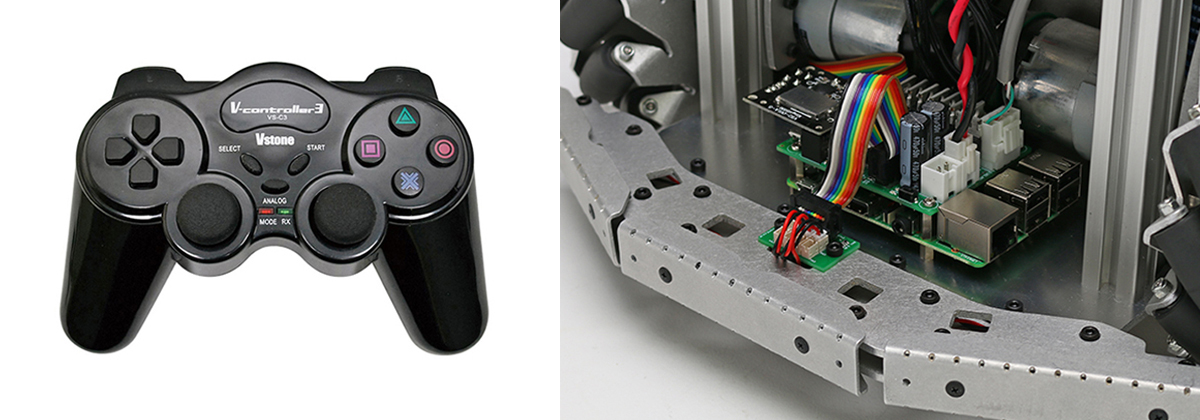
左:無線コントローラ、右:Raspberry Pi 3B搭載(オプション)
・ROSメッセージ通信でコントロール
Wi-Fiまたは、USBシリアル通信を用いてROS環境に接続することができます。ROSのメッセージ通信に対応しているので、速度や旋回量の指令値を、わずか数行のコードでメカナムローバーに送信することができます。導入ドキュメントとサンプルプログラムが付属するため、初心者の方でも、ROS 環境で制御システムを作成し、簡単に動かすことができます。
※ROSを動作させるデバイスは別途ご用意いただく必要があります。
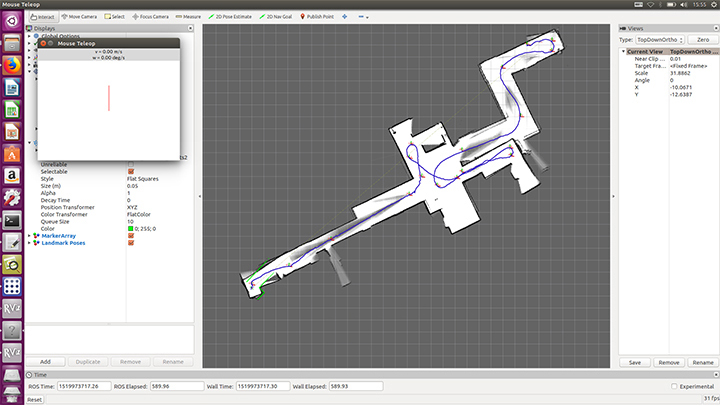
SLAM サンプルによる地図作成
・Arduino IDEでプログラム可能
メカナムローバーVer2.0の制御ボードである「VS-WRC021」には、ESP-WROOM-32 マイコンが搭載されています。そのため、Arduino IDEを用いて制御プログラムを作成することが可能です。また、製品付属のライブラリには、モータ制御関数や通信関数が含まれていますので、少ない開発負担で制御プログラムを作成することもできます。
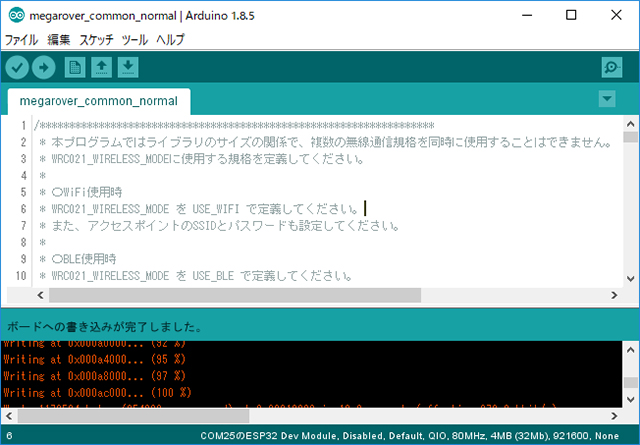
Arduino IDE
【製品概要】
製品名:メカナムローバーVer2.0
型番:4571398312793
価格:540,000円(税込)
サイズ:398(L)×349(W)×166(H) [mm]
バッテリー:12Vシール鉛312wh
駆動方式:4輪駆動、メカナムホイール、15mmサスペンション
回転検出:エンコーダ
付属品:充電器、無線コントローラ
インターフェース:USBシリアル、Wi-Fi、Bluetooth Classic、BLE
※注文時オプション:バンパーセンサ、レーザレンジファインダー、Raspberry Pi 3B
製品サイト:https://www.vstone.co.jp/
販売サイト:https://www.vstone.co.jp/robotshop/
ヴイストン株式会社