圧縮空気の力で駆動するソフトアクチュエータ、空気圧人工筋肉Pneumuscle(ニューマッスル)の製造・販売を手掛ける株式会社コガネイ(所在地:東京都小金井市、代表取締役社長:岡村 吉光)は、空気圧人工筋肉の制御を手軽に実現できるコントローラ「PMCシリーズ」を開発しました。PMCシリーズは、eコマース(Amazonビジネス)で2021年6月10日から販売を開始します。価格は税込¥64,900-(形式:PMC-PT-AC)です。
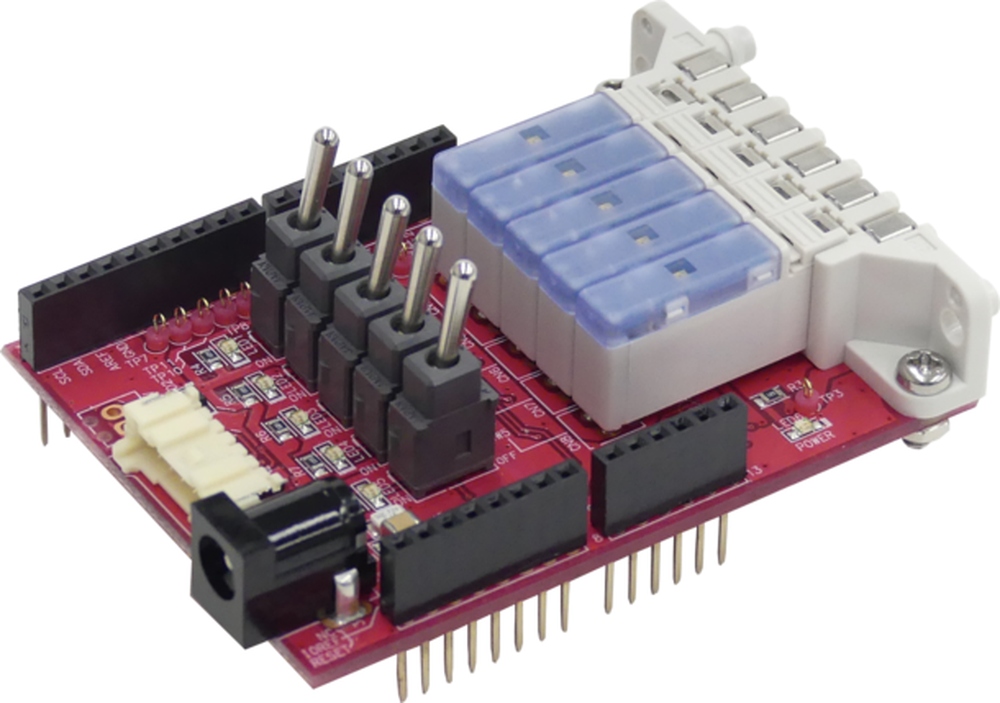
PMC-PT-AC
当社の空気圧人工筋肉は、軽く、細く、しなやかな特長から、ロボットハンドや生物模倣ロボットなどへの応用が研究されています。例えば、人間の手を模倣した五指のロボットハンドは、それぞれの指に対応させた空気圧人工筋肉を連動させて制御しています。制御は圧縮空気の供給・排気を切り替える空気圧バルブなどの様々な空気圧機器を組み合わせて、それらを動かすための電気回路、プログラミングを構成する必要があり、様々な分野の専門知識が求められます。
当社内でも空気圧人工筋肉の用途開発を進めていますが、開発担当者からは、「機器選定や回路設計、配管・配線、プログラミングが煩わしい。もっと楽にできないだろうか。」「用途開発の本分にリソースを注力したい。」といった悩みの声が上がっていました。このような悩みは社内に限らず、空気圧人工筋肉の用途開発や応用研究に携わる方々にも共通すると考え、それを解決する手段をコンパクトにパッケージングしたPMCシリーズを開発しました。
PMCシリーズは、Arduino uno R3に対応したシールド基板で、基板に小形の空気圧バルブを5台搭載しています。電源は家庭用コンセントから供給できて、空気圧の配管は搭載するバルブに空気圧源と動作させたいロボットを接続するだけです。当社の特設ホームページからダウンロードしたソースコードをArduino uno R3に書き込み、パラメータを設定するだけでロボットを制御することができます。もちろん、お客様ご自身で作成したソースコードを書き込んで使用することもできます。研究開発のクイックスタートには、うってつけの製品であり、小形・軽量であることから、装置などへの組込みにも適しています。
当社は今後、特設ホームページ内で定型のArduino用ソースコードを公開していくとともに、お客様のご要望に応じて専用のArduino用ソースコードの作成も請け負います。
【仕様】
形式 :PMC-PT-AC
電源電圧 :DC12V±10%
消費電力 :(バルブOFF時)71mA/(全てのバルブON時)310mA
通信機能 :シリアル通信
質量 :63g
使用流体 :空気
使用圧力範囲:0-0.7MPa[空気圧人工筋肉(別売)は0-0.3MPa]
付属品 :ACアダプタ(入力:AC100V(50Hz/60Hz)、出力:DC12V/1.2A)
【イプロスものづくり掲載ページ】
URL: https://www.ipros.jp/product/detail/2000616505
【PMCシリーズに関するお問い合わせ先】
株式会社コガネイ MIRAI事業部
〒184-8533 東京都小金井市緑町3丁目11-28
TEL : 042-383-7138
FAX : 042-380-7412
URL : https://www.mirai-projects.com/pneumuscle
E-MAIL: ec-support@koganei.co.jp
【会社情報】
称号 : 株式会社コガネイ
代表者 : 代表取締役社長 岡村 吉光
所在地 : 〒184-8533 東京都小金井市緑町3丁目11-28
事業内容: 工作機械、工具、給油装置、空圧並びに油圧機器、
静電気応用機器、電動機器、流体制御機器、環境機器、医療機器、
医療器具および付属品の製作加工、販売