ビジョンセンサーに求められているもの
ビジョンセンサーには使い手側から求められる機能がある。それが次の3点だ。
①小型軽量であること
工場などで導入されている人型ロボットやロボットアームでは人間のように機能性の高いロボットが求められている。そのためロボットの手先などに取り付けることができるビジョンセンサーが求められているのだ。
②3次元を計測できること
部品など形もサイズも様々な物が乱雑に置かれている場合、どのくらい手を伸ばすことで対象を掴むことが出来るか計測する必要がある。それには3次元を計測出来るセンサーが必要となる。
③高速・高精度であること
産業現場ではスピードを重視しているため、速度が速くても精度が悪いとピッキングに失敗した場合の後処理やリトライに時間がかかってしまう。それではロボットを導入する意味がなくなってしまうので高速・高精度が必要になってくるのだ。
東京ロボティクス内では、下記の機能をある程度備えた手ごろな価格のビジョンセンサーが無いとの話が出ており、顧客間でも同様の話が上がっていたことから開発に踏み切った。
Torobo Eye SL40
では『Torobo Eye SL40』とはどんな製品なのか?簡単にご説明しよう。
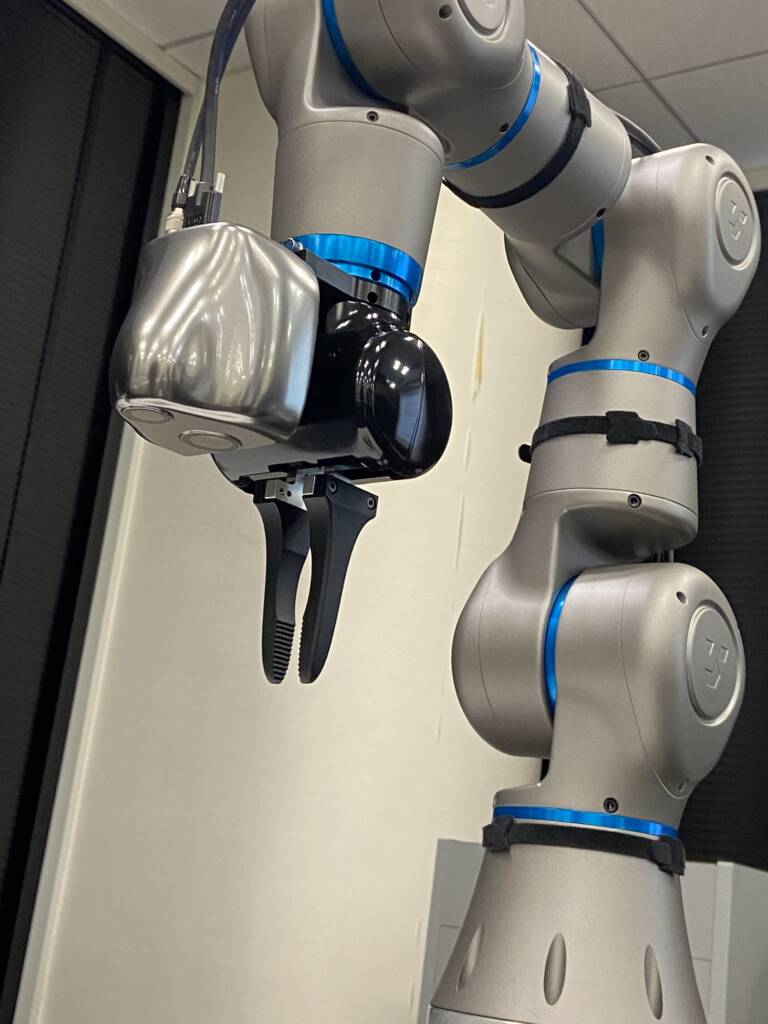

コンパクトなフォルム
見た目は非常にコンパクトで、重さは460グラム。手のひらに乗せることが出来るほど小さく軽い製品となっている。
ストラクチャードライト方式による物体検知
上部がカメラ、下部がプロジェクターとなっている本製品。カメラで照射した縞模様に物体が当たることで縞模様に歪みが生じ、その歪みを三角測量のプロジェクターで見ることによって物体の奥行きが分かる仕組みになっている。
業界最速クラスのFPS(フレームレート)
業界最速クラスの10FPSを誇り、それでいて精度は奥行きの標準偏差で0.06mm。これは1円玉サイズのネジをピッキングする際にも使用することが出来るのだ。
AI連携が容易
奥行き画像とカラー画像の同軸撮影が可能であるため画像にズレが生じない。これによりAIの認識時とカメラの画像が一致することで容易にAI連携を行うことが出来る。また、AIはカラー画像から様々な情報を取得することが出来るため、まだまだ人の手で行われている外観検査や形状測定、良否判断もシステムで行うことが大いに期待出来る。
撮影画像
取得出来るデータは点群情報、デプス画像、カラー画像となり、光の色は基本的な白のほかに赤色・緑色・青色に分けることが出来る。物体に応じて光の色を変えることで、よりノイズの少ない高品質な計測が期待出来るのだ。

今後について
出力の大きさや計測範囲などラインナップを拡張していき、ユーザーのニーズに合わせて製品を出していきたいとのこと。
現在は別の計測方式のセンサーの開発も進めているため、とても楽しみである。
3月にはイベントに出展予定なので興味ある方は是非足を運んでほしい。
―「FOODEX JAPAN/国際食品・飲料展」―
期間:3/9~3/12
会場:幕張メッセ
URL:https://www.jma.or.jp/foodex/
会社概要

企業名:東京ロボティクス株式会社
所在地:東京都新宿区山吹町347 藤和江戸川橋ビル5階
URL:https://robotics.tokyo/ja/